00:00:01
chapter 13 is about simple harmonic
00:00:03
motion In Waves we'll talk about simple
00:00:05
harmonic motion first simple harmonic
00:00:08
motion is a subtype of periodic motion
00:00:11
which means an object repeating the same
00:00:14
path over and over taking the same
00:00:15
amount of time which is called the
00:00:17
period capital T each cycle
00:00:20
we already saw one example of periodic
00:00:22
motion which is uniform circular motion
00:00:25
like the ball on an end of a string
00:00:27
whirling around in a circle with
00:00:29
constant speed or planets orbiting
00:00:31
around their star that's one example of
00:00:34
periodic motion repeating the same orbit
00:00:37
over and over
00:00:39
other examples of periodic motion
00:00:41
include Springs and pendulums and those
00:00:44
are a special subtype of periodic motion
00:00:48
that are called simple harmonic motion
00:00:53
simple harmonic motion is just periodic
00:00:55
motion that means for two further
00:00:57
criteria Criterion one is that the force
00:01:01
needs to be proportional to the
00:01:03
displacement Criterion two is that the
00:01:06
force is always directed back toward the
00:01:08
equilibrium position meaning that it is
00:01:10
a restoring Force
00:01:14
Springs are only simple harmonic
00:01:17
oscillators meaning things doing simple
00:01:19
harmonic motion if there's no friction
00:01:22
there
00:01:23
in the real world where there's friction
00:01:25
if I were to pull the this Mass downward
00:01:28
and then let it go it would boing back
00:01:31
and forth back and forth but the
00:01:33
amplitude of its motion would decrease
00:01:34
over time until it eventually came back
00:01:37
to rest that would be the influence of
00:01:40
friction and we call that a damped
00:01:42
harmonic oscillator a simple harmonic
00:01:46
oscillator in a system that has no
00:01:48
friction the motion would not damp the
00:01:52
amplitude would stay the same forever
00:01:54
and the object would repeat the exact
00:01:56
same path over and over and over and
00:01:58
over again with the same amount of time
00:02:01
per cycle for each one
00:02:04
similarly for a pendulum if we assume
00:02:07
that there is no friction up at the
00:02:09
pivot and no air resistance if we set
00:02:12
our pendulum at some initial
00:02:14
displacement called the amplitude and
00:02:16
then let it go it's going to go tick
00:02:18
tock tick tock back and forth with the
00:02:21
same amplitude of motion over and over
00:02:23
and over again taking the same amount of
00:02:25
time for each cycle
00:02:29
Springs and pendulums are not the only
00:02:31
examples of simple harmonic oscillators
00:02:33
simple harmonic motion occurs across
00:02:36
many different types of physics problems
00:02:39
you'll see simple harmonic oscillators
00:02:41
come back in quantum mechanics and
00:02:43
condensed matter physics and
00:02:45
astrophysics and all kinds of sort of
00:02:48
more complex physical situations
00:02:51
and so the beauty of simple harmonic
00:02:54
motion is that the equations that we're
00:02:56
going to derive in this chapter for a
00:02:58
relatively simple systems like a spring
00:03:00
and a pendulum would be ones that you
00:03:03
can still use as like a physics grad
00:03:05
student studying a much more complex
00:03:07
problem
00:03:09
let's talk about Springs first this is a
00:03:12
slide from chapter five where we first
00:03:15
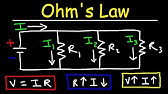
learned spring Force equation which is
00:03:18
called hooke's law and it says that the
00:03:21
spring Force has a vector is equal to
00:03:24
negative K times the displacement X as a
00:03:28
vector so the negative here is telling
00:03:31
us that the spring force and
00:03:33
displacement are in opposite directions
00:03:35
from each other so if we have an Vector
00:03:38
X the displacement that is pointing to
00:03:40
the right because someone pulled the
00:03:42
spring to the right the spring force is
00:03:45
to the left notice that's pointing back
00:03:48
towards equilibrium so that's meeting
00:03:50
the second Criterion about simple
00:03:52
harmonic motion we've got a restoring
00:03:54
Force right here
00:03:57
the other Criterion the first Criterion
00:03:59
for simple harmonic motion was that the
00:04:01
force was proportional to the
00:04:02
displacement and we can in fact here see
00:04:05
that our spring force is proportional to
00:04:07
X and so Springs therefore are going to
00:04:11
be examples of simple harmonic
00:04:13
oscillators as long as the spring force
00:04:16
is the only force that is acting
00:04:18
which means we have to assume no
00:04:21
friction
00:04:23
the other thing that we might need to
00:04:25
ignore is gravity so let's think about
00:04:27
the example of a vertical spring
00:04:30
if we have a vertical spring hanging
00:04:33
here with no Mass on the end it's just
00:04:35
going to be hanging there with some
00:04:36
length to it the end of the spring we
00:04:40
would say is the old equilibrium
00:04:42
position
00:04:43
now if we attach a mass to the end of
00:04:45
the spring the spring is going to
00:04:47
stretch a bit and now the end of the
00:04:50
spring we would say is that the new
00:04:52
equilibrium position
00:04:55
the distance that the spring stretched
00:04:57
let's call X naught
00:05:00
if the mass is in equilibrium here on
00:05:03
the end of the spring that means our
00:05:05
Mass is at rest staying at rest
00:05:09
um for example then that means that the
00:05:11
net force is going to be equal to zero
00:05:13
our spring Force pulling up is equal to
00:05:17
K times x naught our Gravity Force
00:05:20
pulling down is mg so k x naught minus
00:05:24
mg equals zero and we can solve for x
00:05:27
naught
00:05:29
this tells us how much the spring would
00:05:32
stretch when we put some Mass M on it
00:05:35
if now we Define our new equilibrium
00:05:38
position to be the new x equals zero
00:05:41
spot
00:05:42
when we pull the mass downward and Let
00:05:45
It Go the oscillation of the spring is
00:05:47
going to be centered around that new
00:05:49
equilibrium position the new x equals to
00:05:52
zero and the gravity is no longer
00:05:54
important so gravity just told us how
00:05:57
much to sort of redefine our coordinate
00:05:59
system here but now we don't need to
00:06:01
consider gravity as a force acting on
00:06:03
the mass anymore we've already taken
00:06:06
that into account
00:06:07
and that means we can still treat
00:06:09
vertical Springs as simple harmonic
00:06:11
oscillators too as long as there's no
00:06:14
friction
00:06:16
if the spring force is the only force in
00:06:20
the problem because we have already
00:06:22
accounted for the gravity if it's a
00:06:24
vertical Spring by redefining the
00:06:26
equilibrium position and we're saying
00:06:28
there's no friction then our spring
00:06:31
force and net force are the same
00:06:34
spring force is equal to negative KX net
00:06:38
force according to Newton's second law
00:06:40
of motion is equal to mass times
00:06:41
acceleration setting those equal to each
00:06:44
other lets us solve for the acceleration
00:06:46
of a mass spring system
00:06:49
and you can see here that the
00:06:51
acceleration depends on displacement
00:06:54
so if we have a spring that is boinging
00:06:57
back and forth with X changing as a
00:07:00
function of time that means a is also
00:07:03
going to end up changing as a function
00:07:04
of time that the acceleration is not a
00:07:07
constant and that means we can't use
00:07:10
kinematic equations here which were only
00:07:12
valid for constant acceleration and
00:07:15
we're going to have to come up with a
00:07:16
set of new equations to use in place of
00:07:19
kinematics equations
00:07:21
satisfying the same sort of need of
00:07:24
being able to relate position velocity
00:07:26
acceleration and time to each other
00:07:29
we've already got a start on that this
00:07:32
equation relates our acceleration and
00:07:35
our displacement which would be the same
00:07:38
thing as the position of the end of the
00:07:40
spring to each other but now we also
00:07:43
want something that's going to relate
00:07:46
um our velocity to those things and then
00:07:49
also to time and so we'll need to sort
00:07:52
of build up those equations
00:07:55
here's an illustration showing how
00:07:58
acceleration and speed are depending on
00:08:01
displacement and then since displacement
00:08:03
changes with time that means they also
00:08:05
are going to end up depending on time
00:08:08
imagine that we had it block on the end
00:08:10
of a spring that was displaced to the
00:08:13
right initially and then let go
00:08:16
if the block was held at rest up until
00:08:18
it was let go our initial speed is going
00:08:21
to be zero
00:08:23
and there's an acceleration that is to
00:08:25
the left in the opposite direction as
00:08:28
our displacement Vector which is
00:08:29
pointing to the right since the block
00:08:31
got pulled to the right before being let
00:08:33
go
00:08:37
now as our acceleration is to the left
00:08:41
that's going to cause the block to start
00:08:44
moving to the left
00:08:47
when the block reaches equilibrium
00:08:49
there's no more acceleration at that
00:08:51
point but there is already a speed to
00:08:54
the left so the block is going to
00:08:55
continue moving through equilibrium past
00:08:58
equilibrium it keeps moving left but now
00:09:02
our acceleration is to the right
00:09:04
pointing back towards equilibrium
00:09:06
because we have a restoring force uh and
00:09:10
so our block is moving left while
00:09:12
accelerations to the right we get a
00:09:14
slowing down that happens until
00:09:16
eventually the block is going to come to
00:09:19
rest momentarily so V will be zero just
00:09:22
for a moment but at that point the
00:09:25
acceleration is in zero our acceleration
00:09:27
is to the right so the block doesn't
00:09:29
stay at rest but instead starts moving
00:09:31
to the right
00:09:32
it passes through equilibrium again so
00:09:35
we've got another moment where a is zero
00:09:38
but the speed is maximum and then it
00:09:40
keeps going until it stops again
00:09:42
momentarily at the displacement over
00:09:45
here on the other side and when we reach
00:09:48
a maximum displacement that is equal to
00:09:50
the amplitude
00:09:52
since we're saying no friction the spot
00:09:54
it gets to here has the same
00:09:56
displacement a as it did at the very
00:09:58
beginning
00:10:00
so back and forth back and forth you can
00:10:02
see that the acceleration and the speed
00:10:04
are both continuously changing during
00:10:07
this motion we're going to need to get
00:10:10
an equation that will give us V as a
00:10:13
function of X just like this one is a as
00:10:16
a function of x
00:10:18
and then we're also going to want
00:10:20
equations that give us V and a and X as
00:10:23
functions of time and so that will be in
00:10:25
the next videos deriving those equations